We come now to the remarkable connection that exists between integration and differentiation. The relationship between these two processes
is somewhat analogous to that which holds between 'squaring' and 'taking the square root'. If we square a positive number and then take the positive
square root of the result, we get the original number back again. Similarly, if we operate on a continuous function f by integration, we get a new
function (an indefinite integral of f) which, when differentiated, leads back to the original function.(Apostol, pp. 202)
This connection between differentiation and integration is very surprising.
Integration is related with adding together many very small numbers (for example, when we calculate an area, the length of a curve, etc.) and
differentiation is the instantaneous rate of change (one graphical interpretation is the slope of the tangent to a curve).
The Fundamental Theorem of Calculus tell us that this two concepts are intimately related.
We know that if f is integrable, then F(x) [an indefinite integral] is continuous; it is only fitting that we ask what happens when the original
function f is continuous. It turns out that F is differentiable (and its derivative is especially simple).[Spivak]
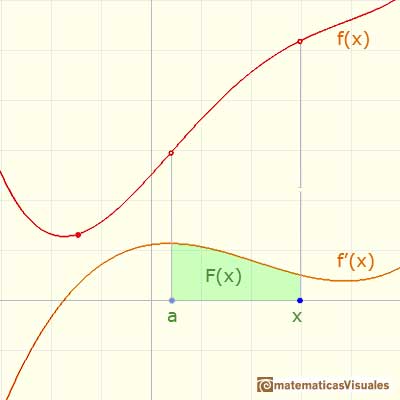
(FUNDAMENTAL THEOREM OF CALCULUS First) Let f be an integrable function on [a,b], and define a new function F on [a,b] by
If f is continuous at c in [a,b], then F is differentiable at c, and
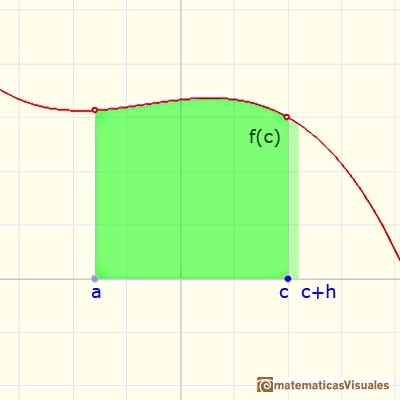
A well known visual demonstration assumes that the function f is continuous in some neighborhood of the point (this is a weaker condition, the
hypothesis of the theorem is stronger. If you need a more analytical and rigorous proof you can read it in a good book about Calculus)
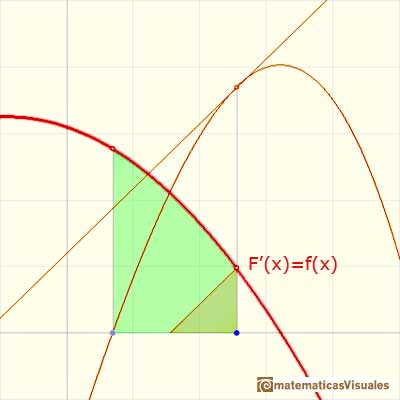
If c is in (a,b), looking at the image you could agree that
If h is small enough (to be more precise, here you can use the mean-value theorem)
Dividing by h:
If f has better properties, if f is continuous at all points in [a,b], then F is differentiable at all points in [a,b] and
or
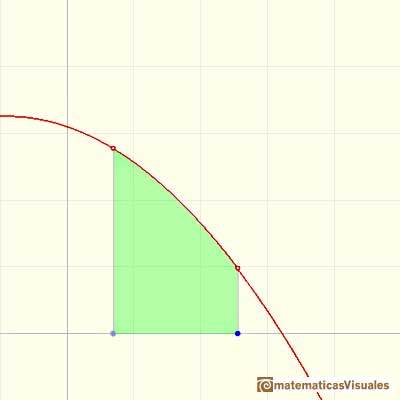
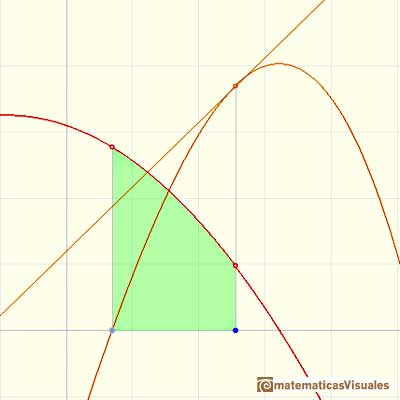
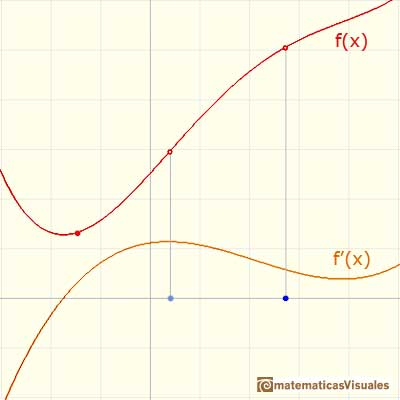
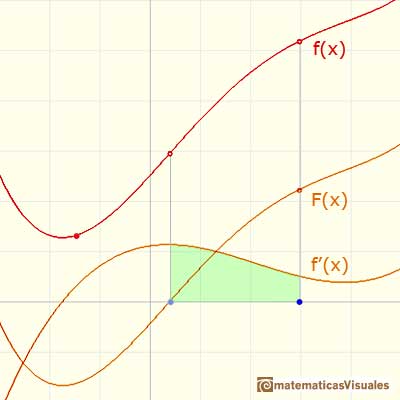
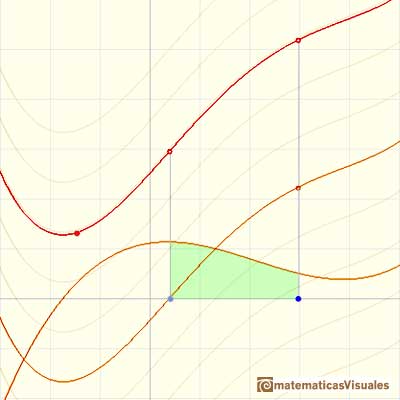
The idea is, we start with a function f:
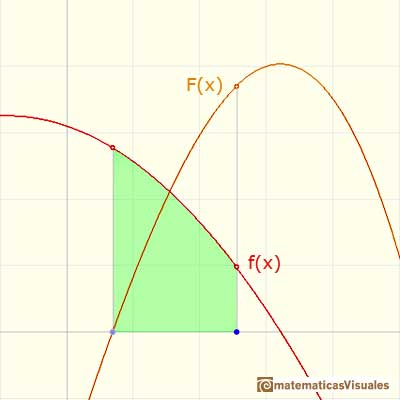
We consider an indefinite integral function F (dragging the lower limit of integration you get different integral functions):
At a point we differentiate this function F (graphically, this is the slope of the tangent line):
And then:
This FTC tell us that every continuous function has an antiderivative and shows how to
construct one using an indefinite integral.
Even those non-differentiable functions with "corners" such
as absolute value has an antiderivative.
Sometimes the problem is how to find an antiderivative of a function: given a function f(x), find a function F(x) such that F'(x) = f(x).
An important case is when we want to integrate a function that has an antiderivative (a primitive). It is to say, you know a function f and
you want to integrate f' (or you have to integrate f' and you can find an antiderivative f). In this case, we see the function to be integrate as
a rate of change and the integral as an accumulator of this change (example: the integral of the velocity is the distance).
You define an integral function F (but now we are integrating f'):
And then F is and antiderivative of f', it is to say:
We can see some basic concepts about integration applied to a general polynomial function. Integral functions of polynomial functions are polynomial functions with one degree more than the original function.
It is easy to calculate the area under a straight line. This is the first example of integration that allows us to understand the idea and to introduce several basic concepts: integral as area, limits of integration, positive and negative areas.
To calculate the area under a parabola is more difficult than to calculate the area under a linear function. We show how to approximate this area using rectangles and that the integral function of a polynomial of degree 2 is a polynomial of degree 3.
If the derivative of F(x) is f(x), then we say that an indefinite integral of f(x) with respect to x is F(x). We also say that F is an antiderivative or a primitive function of f.
The integral concept is associate to the concept of area. We began considering the area limited by the graph of a function and the x-axis between two vertical lines.
Monotonic functions in a closed interval are integrable. In these cases we can bound the error we make when approximating the integral using rectangles.
If we consider the lower limit of integration a as fixed and if we can calculate the integral for different values of the upper limit of integration b then we can define a new function: an indefinite integral of f.
A piecewise function is a function that is defined by several subfunctions. If each piece is a constant function then the piecewise function is called Piecewise constant function or Step function.
Lagrange polynomials are polynomials that pases through n given points. We use Lagrange polynomials to explore a general polynomial function and its derivative.
Two points determine a stright line. As a function we call it a linear function. We can see the slope of a line and how we can get the equation of a line through two points. We study also the x-intercept and the y-intercept of a linear equation.
Polynomials of degree 2 are quadratic functions. Their graphs are parabolas. To find the x-intercepts we have to solve a quadratic equation. The vertex of a parabola is a maximum of minimum of the function.
We can consider the polynomial function that passes through a series of points of the plane. This is an interpolation problem that is solved here using the Lagrange interpolating polynomial.
In his book 'On Conoids and Spheroids', Archimedes calculated the area of an ellipse. It si a good example of a rigorous proof using a double reductio ad absurdum.


















 NEXT
NEXT

 PREVIOUS
PREVIOUS


























